


Modelo biomecánico de un brazo y trayectorias.

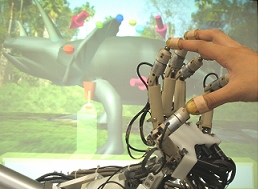
Modelo mecatrónico bioinspirado de una mano humana accionada por dispositivos eléctricos. ¿Te interesa?
Sigue en la web del proyecto de Yoky Matsuoka (una de las mujeres investigadoras más importantes e interesantes del mundo).
IEEE BIOROB 2010 es el evento internacional sobre robótica donde se reunirán los investigadores más importantes en los campos de robots bioinspirados y robots que interactúan con humanos. Quiero contaros el punto de vista que aportan estos investigadores para los robots de rehabilitación, asistenciales para personas con discapacidad y prótesis robóticas. En rehabilitación con robots no todo es el Lokomat o MIT Manus.
Desde luego que hablo de investigación puntera y de desarrollos tecnológicos que están saliendo de su fase conceptual en universidades y saltando a la empresa antes de convertirse en productos comerciales que veamos en rehabilitación o como ayudas técnicas u otroprotésica. Sin embargo mi opinión es que los profesionales de la rehabilitación debemos prestarles atención por su capacidad potencial de cambiar realmente las cosas. Las personas con discapacidad merecen que se les cuente qué y cómo se está investigando y desde luego que los ingenieros reconocerán la calidad de un evento avalado por la IEEE Robotics and Automation Society y la IEEE Engineering in Medicine and Biology Society.

Tendrá lugar en Japón en septiembre de 2010, me encantaría poder estar allí y de paso practicar mi torpe nivel de japonés. Pero sobre todo quiero comentaros por qué me entusiasma tanto.
¿Qué temas se tratarán allí?
Sistemas bioinspirados
Sistemas biomecatrónicos
Biorobots
Exoesqueletos y dispositivos aumentativos
Interacción entre el humano y la máquina
Locomoción y manipulación en robots y sistemas biológicos
Micro y nanotecnologías en medicina y biología
Modelando interacciones entre robots y sistemas biológicos
Neurorobótica
Prótesis
Robotica en rehabilitación y robótica asistencial
Cirugía y diagnóstico
________________________________
LOS TALLERES
Nº1 “Bridging Human Hand Research and the Development of Robotic Technology for Hands” (enlace a la web del taller).


La idea principal de este taller es que la biomecánica de la mano y los modelos esquemáticos y matemáticos que utilizamos para comprender cómo funciona la mano humana se corresponden con los modelos esquemáticos y matemáticos que los ingenieros de robótica hacen para construir manos de robots que imitan a la humana y desde luego las prótesis bioinspiradas de mano que están en desarrollo creciente.
Un ejemplo de un modelo biomecánico de un dedo controlado por movimientos de un dedo real.
Los temas de los que hablarán en este taller los mejores investigadores del mundo son, entre otros:
- Modelos biomecánicos de la mano humana
- Aferencias sensoriales propioceptivas y estereoceptivas
- Control neuromuscular
- Métodos matemáticos y modelos de agarre y manipulación
- Esquemas de control artificial del agarre y la manipulacion
- Dispositivos robóticos para terapia, prótesis, interacción háptica y manipulacióin autónoma.







http://neurobotics.cs.washington.edu/projects.html
Mi favorito.
Mi favorito.



___________________
Y si me perdonaís la broma de Beyoncé, parece ser que a muchas divas les gusta la estética robot. Yo prefiero a Yoki del Neuroroboticas lab en cuanto a investigación...


Autor: Samuel Franco Domínguez
Fascinante el movimiento del dedo que se puede ver en el video, combina muchos micromovimientos dando como resultado un movimiento global de una naturalidad y coordinación casi humana.
ResponderEliminarA ver si puedes asistir a Japón y nos traes información fresca, jeje.
Un saludo maestro!
interesante avance tecnológico para alcanzar el grado de máxima curación en numerosas patologías.
ResponderEliminar